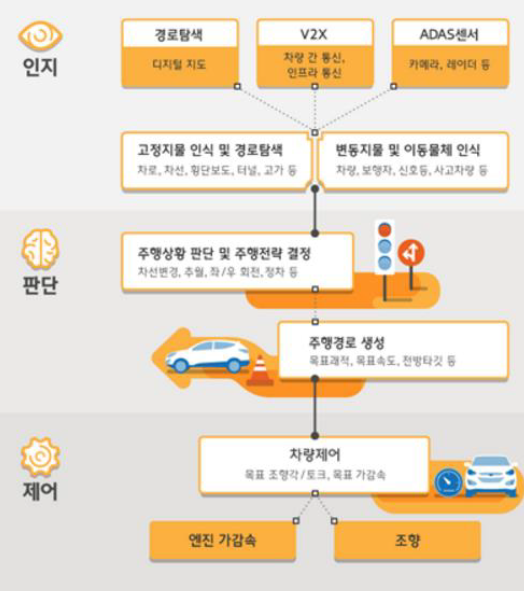
이달부터는 운전자가 운전대를 잡지 않아도 자동으로 차선 유지 기능도 할 수 있어 스스로 멈추는 자율주행차 출시·판매가 가능해진다.자동차 및 자동차 부품 성능과 기준에 관한 규칙을 개정해 안전기준을 ‘부분자율주행차(레벨3)’ 수준으로 높였다니 가능하다.기존 안전기준(레벨2)은 차선유지 기능을 작동시켜도 운전자가 핸들에서 손을 떼면 경고음이 울리는 경보기 수준이었지만 지금은 운전자가 다른 일로 바쁘게 손대지 않아도 주행할 수 있는 단계까지 허용한 것이다.레벨3부터는 자율주행차로 분류된다.
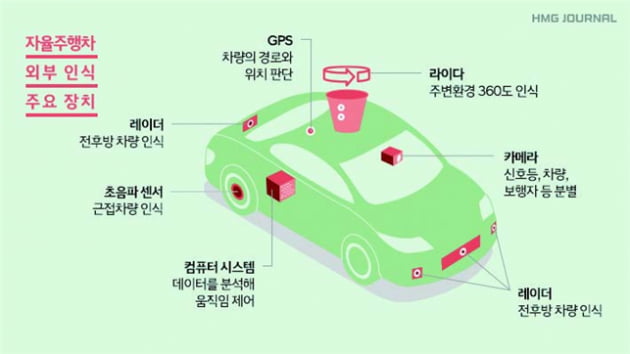
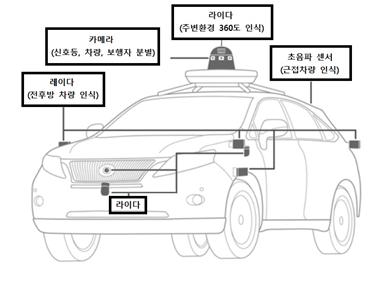
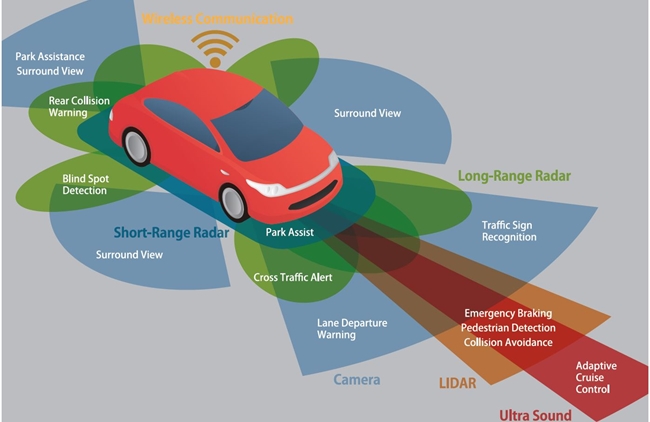
자율주행차는 기본적으로 3개 센서를 이용해 가능하다.먼저 카메라. 카메라는 시각적인 데이터를 획득한다.자율주행차는 전방, 후방, 좌우 카메라를 사용해 360도 시야를 확보할 수 있다. 일부 카메라는 꽤 넓은 화각(120도)을 갖고 있다.어안렌즈 카메라가 장착돼 있으면 차량 뒤쪽의 모든 모습을 꽤 넓은 부분을 볼 수 있고 이에 대한 데이터를 획득한다.카메라는 정확한 비주얼 데이터를 제공하지만 약간의 제한이 있다. 특히 정확한 위치 계산을 시작하려면 거리를 판단하기 위해서는 2차원적인 데이터가 필요하다. 그리고 카메라 센서가 비, 안개 또는 밤과 같이 시인성이 낮은 조건에서 물체를 감지하기 어렵고, 특히 낮은 위치의 저녁햇빛을 마주하면 사물 인식이 제대로 되지 않는 단점이 있다.

이런 단점을 극복하기 때문에 레이더를 장착한다.레이더 센서는 시정의 한계를 지닌 카메라를 보완한다.항공기 기상 형성 및 선박 감지하고 옛날부터 일상적으로 이용되고 있던 기술이지만, 소형화와 내구성이 중요하다.전파를 펄스로 전송하는 일련의 펄스파가 물체에 부딪쳐서 돌아오면, 수신기로 감지하고 속도 및 위치 데이터를 획득한다.레이더 센서는 모든 각도에서 물체를 감지하지만 다른 차량의 유형을 구별할 수 없는 한계가 있다.그래서 추가로 필요한 것이 Lidar이다.이는 레이더와 같지만 그 신호원이 전자파가 아니라 레이저이다.LiDAR는 레이더와 함께 자동 운전 차 거리 감지를 실행하는 중요한 광전자 기술이다.LiDAR센서는 전의 상황에 대한 그림을 그리는 데 도움이 된다.레이저 펄스를 보내반사되는 수신 신호의 시간을 계산하고 거리를 측정하지만 LiDAR은 결국 자동 차에 3D정보를 제공하는 셈이다.특히 주변 차량과 보행자의 형태나 위치 데이터를 제공한다.
인기글




그리고 중요한 GPS를 이용한 자신의 위치에 관한 데이터. 이는 이미 많은 차량에 설치된 네비게이터를 통해 획득하게 된다.또 정보통신기술에 따른 각 교통상황에 대한 정보가 더해지면 완벽하게 자율주행을 하게 된다.각종 상황에 따라 이러한 센서의 데이터를 종합하여 판단하고, 그에 따라 실제 차량을 운행하기 위한 제어는 고성능 컴퓨터 모듈이 된다.

그렇다고 사람이 일으키는 사고를 자동차가 완벽하게 피할 수 있는 건 아니다.환경적 요인에 따라 충분한 데이터를 카메라, 레이더, 리다, GPS가 획득하지 못할 수도 있고 차량 내 전원 불안정으로 인해 센서와 컴퓨터가 제대로 작동하지 못하는 경우도 생길 수 있다.
실제 미국 테슬라 자율주행차는 사고를 내 운전자가 사망한 경우도 있었다.

따라서 술을 마시고 취해 양말을 신발에 넣어 권할 정도로 상태가 나빠도 자율주행은 하지 않는 것이 좋다.만일 제정신으로 자율주행을 하더라도 100% 운전을 차에 맡기는 것은 자제하는 게 중요하다.